

摘 要:本文主要对电动汽车的制动系统进行了简化,通过对再生制动与ABS联合制动仿真模型的仿真结果进行了分析。仿真结果表明模糊—PID控制的ABS再生制动系统效果更好,并且与实际情况比较吻合,对电动汽车再生制动系统的理论研究与设计有一定的意义。
关键词:电动汽车;ABS;再生制动
再生制动与ABS联合制动的控制策略在传统的化石燃料汽车上是没有的,只出现在電动汽车上。这个系统的重点在于怎样来调节传统的制动方式与再生制动之间的制动比例。同时,为了得到较好的驾驶平顺感,再生制动力的大小应该可以调节传统的ABS产生的液压制动力的大小,相互配合后达到驾驶员所需要的汽车制动力。
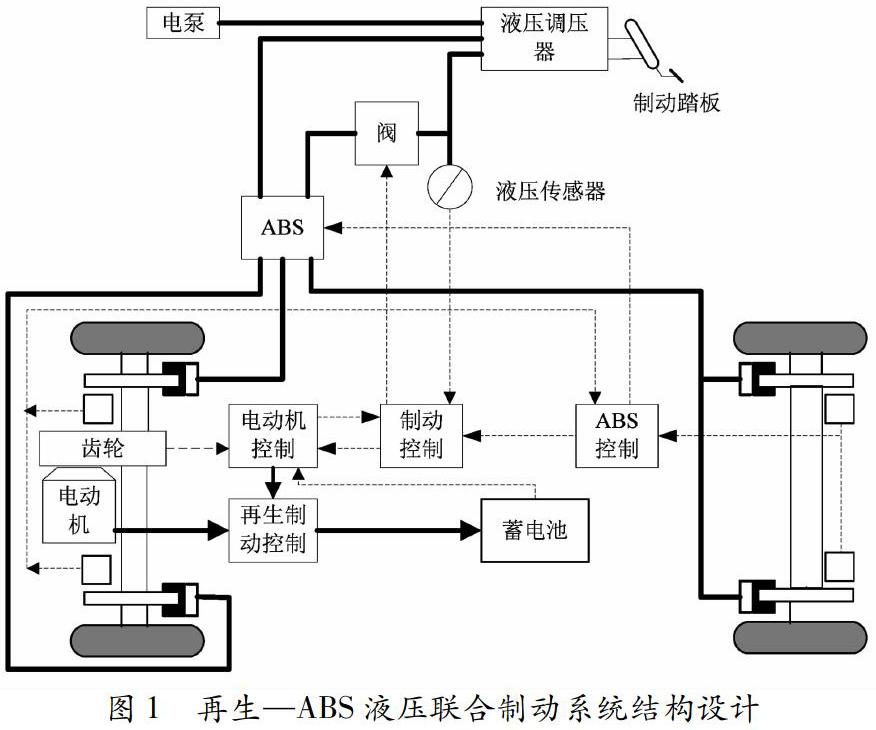
为了能够达到这一要求,混合制动系统可以采用下面的设计结构,如图1所示。当驾驶员实施制动,电动泵开始工作,产生制动所需要的高油压,形成制动力,制动控制和电动机控制相互协调,确定每个轮上所需要的合适的制动力。在进行制动时,再生的制动系统会将制动时产生的能量进行回收,然后储存到蓄电池中。
总的制动力矩取决于传统制动和再生制动的力矩之和,并满足预定的比例关系,如图2所示,就是为了既满足最大再生制动力的要求,又满足驾驶员的舒适感。当踏板的转动角度较小时,只允许再生制动系统对驱动轮实施制动。当转动角度超过预定值时,全部的再生制动力都加在轮上,并且由液压制动系统补充所需的剩余制动力。也就是说为了回收制动能量,再生制动力矩可以保持在最大值。
当然整个制动过程中能量是不可能全部被回收。回收的过程中也伴随着能量的损失。当然在这些损失的前提下,电动汽车仍然能够节省20%的能量。
当电动汽车需要紧急制动时仅靠再生制动就不能满足制动要求了,此时就需要ABS与再生制动协同合作来完成制动过程。
根据再生制动原理和单轮车制动力学模型建立了门限值—PID控制模型及模糊—PID控制模型,通过仿真数据测试得出测试结果如下:
由仿真结果图3-5可见与门限值—PID控制相比采用模糊—PID控制:
(1) 采用再生制动时电流比较平稳,其时间调整为0.9s,超调量为9A。而门限值控制的电流调整时间为1.2s,超调量为13A。
(2) 采用模糊—PID控制制动时间短。车速由每秒30m降到0m所用时间为3.85s,而门限值—PID控制为4.3s。
(3) 采用模糊—PID控制制动距离较短。车速由30m/s降到0m/s时的制动距离为62.48m,而门限值—PID控制为70.17m。
通过测试结果表明模糊—PID控制ABS再生制动系统的效果更好,其结果与真实情况基本相同,这对电动汽车再生制动系统理论与现实设计有指导作用。
[参考文献]
[1]陈清泉,孙鹏春等.现代电动汽车技术[M].北京:北京理工大学出版社,2014(7).
[2]洪乃刚等.电力电子和电力拖动控制系统的MATLAB仿真[M].北京:机械工业出版社,2016(5):131-133.
[3]周渊深.电力电子技术与MATLAB仿真[M].北京:中国电力出版社,2015(12):176-180.
[4]洪乃刚.电力电子技术基础[M].北京:清华大学出版社,2017(1):126-130.
[5]刘金翠,张伯俊.汽车ABS模糊控制方法研究[J].天津工程师范学院学报,2017(9),21-23,27.
[6]唐剑飞,桂永胜.浅析电动汽车中的再生制动[J].汽车电器, 2017(8):12-15.
[7]陈清泉,孙逢春等.现代电动汽车技术[M].北京:北京理工大学出版社,2004(7):260-263.
[8]赵国柱,杨正林等.基于ECE法规的电动汽车再生制动控制策略的建模与仿真[J].武汉理工大学学报:交通科学与工程版,2018(1):149-152.
(作者单位:山东科技职业学院,山东 潍坊 261053)